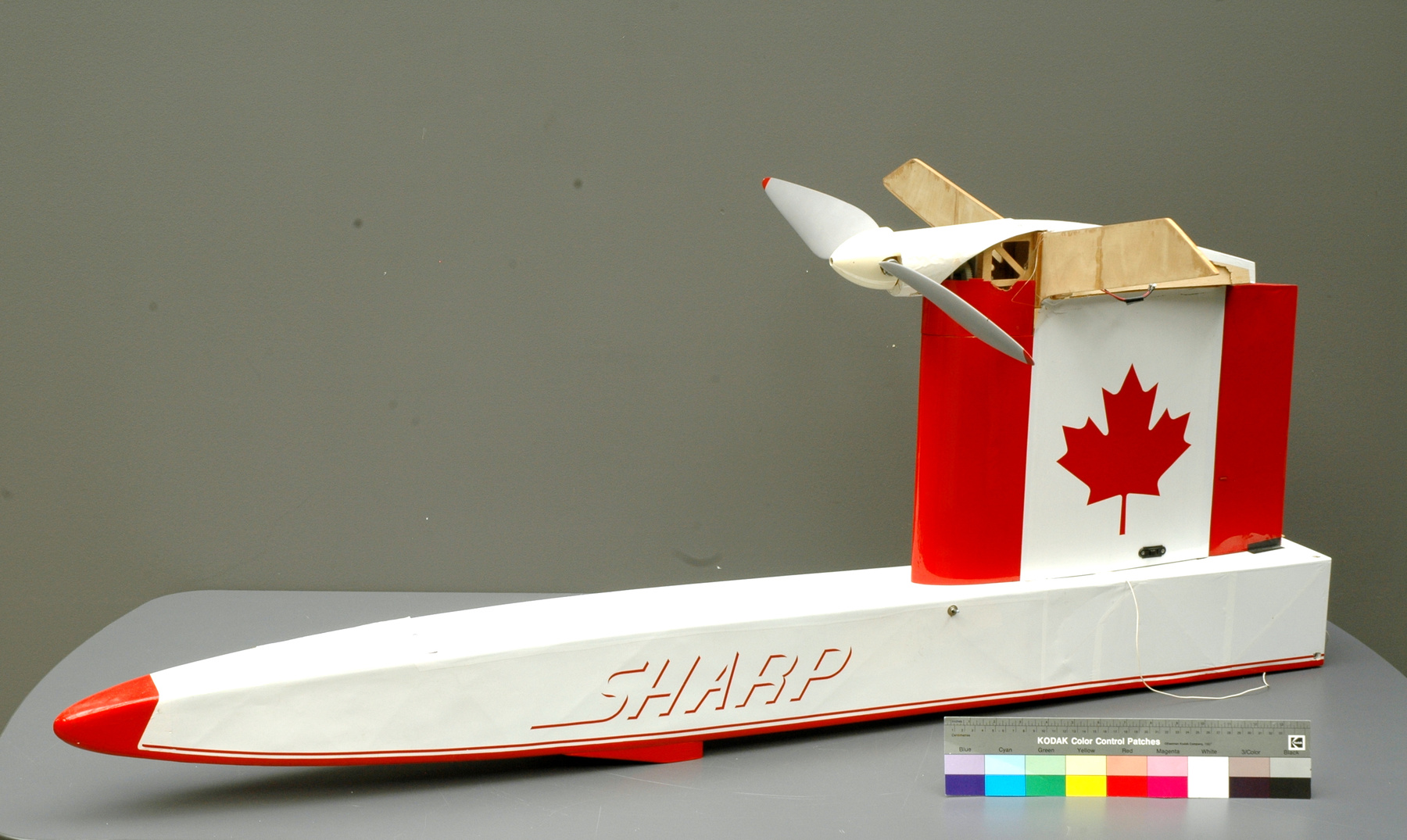
Excavator, autonomous
Use this image
Can I reuse this image without permission? Yes
Object images on the Ingenium Collection’s portal have the following Creative Commons license:
Copyright Ingenium / CC BY-NC-ND (Attribution-NonCommercial 4.0 International (CC BY-NC 4.0)
ATTRIBUTE THIS IMAGE
Ingenium,
2014.0031.001
Permalink:
Ingenium is releasing this image under the Creative Commons licensing framework, and encourages downloading and reuse for non-commercial purposes. Please acknowledge Ingenium and cite the artifact number.
DOWNLOAD IMAGEPURCHASE THIS IMAGE
This image is free for non-commercial use.
For commercial use, please consult our Reproduction Fees and contact us to purchase the image.
- OBJECT TYPE
- mining
- DATE
- 2011
- ARTIFACT NUMBER
- 2014.0031.001
- MANUFACTURER
- Laurentian University (Bharti School of Engineering)
- MODEL
- Lunabot
- LOCATION
- Sudbury, Ontario, Canada
More Information
General Information
- Serial #
- N/A
- Part Number
- 1
- Total Parts
- 1
- AKA
- Rover
- Patents
- N/A
- General Description
- Primarily metal with synthetic components
Dimensions
Note: These reflect the general size for storage and are not necessarily representative of the object's true dimensions.
- Length
- 240.0 cm
- Width
- 80.0 cm
- Height
- 164.0 cm
- Thickness
- N/A
- Weight
- 77.1
- Diameter
- N/A
- Volume
- N/A
Lexicon
- Group
- Space Technology
- Category
- Miscellaneous
- Sub-Category
- N/A
Manufacturer
- AKA
- Laurentian
- Country
- Canada
- State/Province
- Ontario
- City
- Sudbury
Context
- Country
- Unknown
- State/Province
- Unknown
- Period
- Unknown
- Canada
-
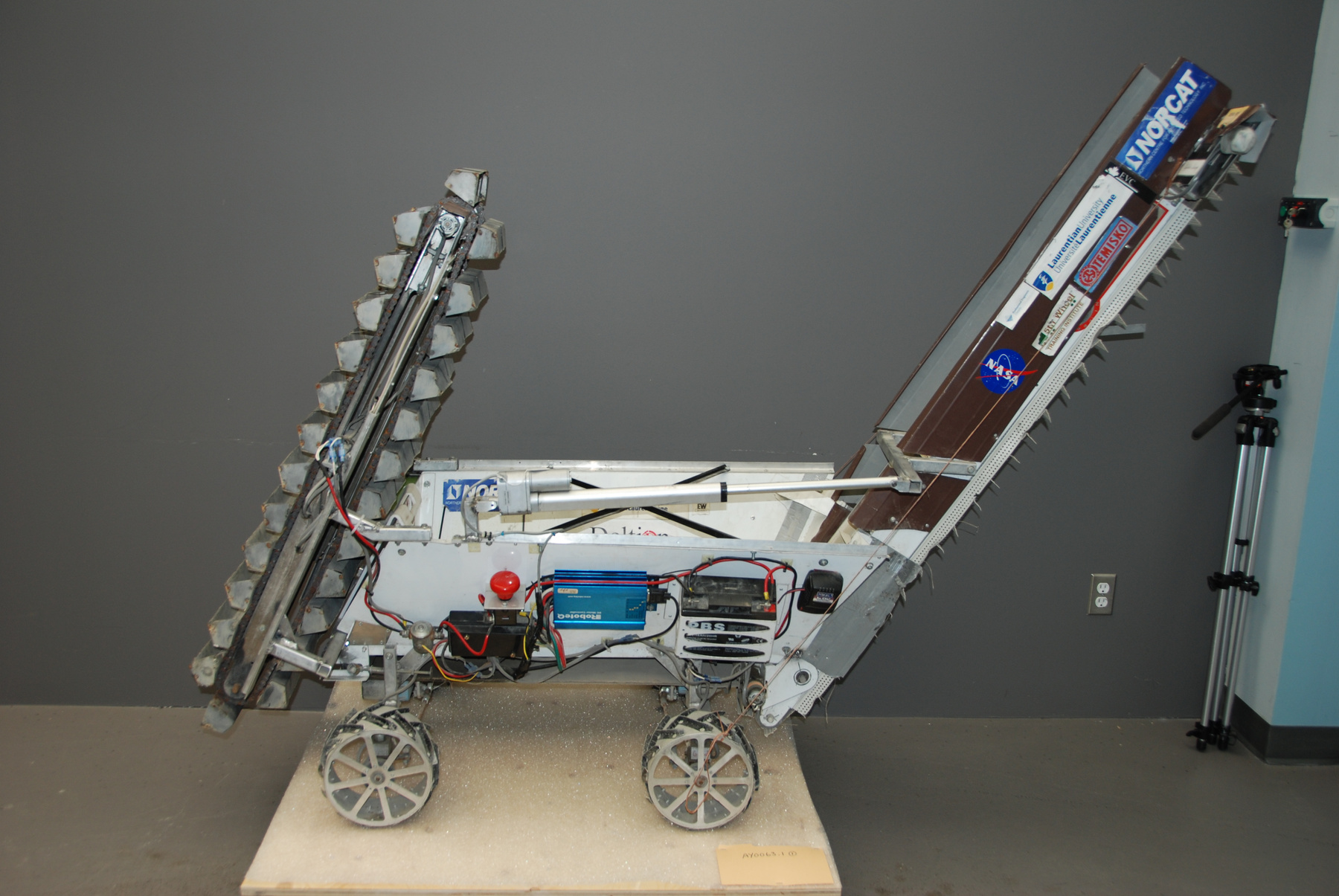
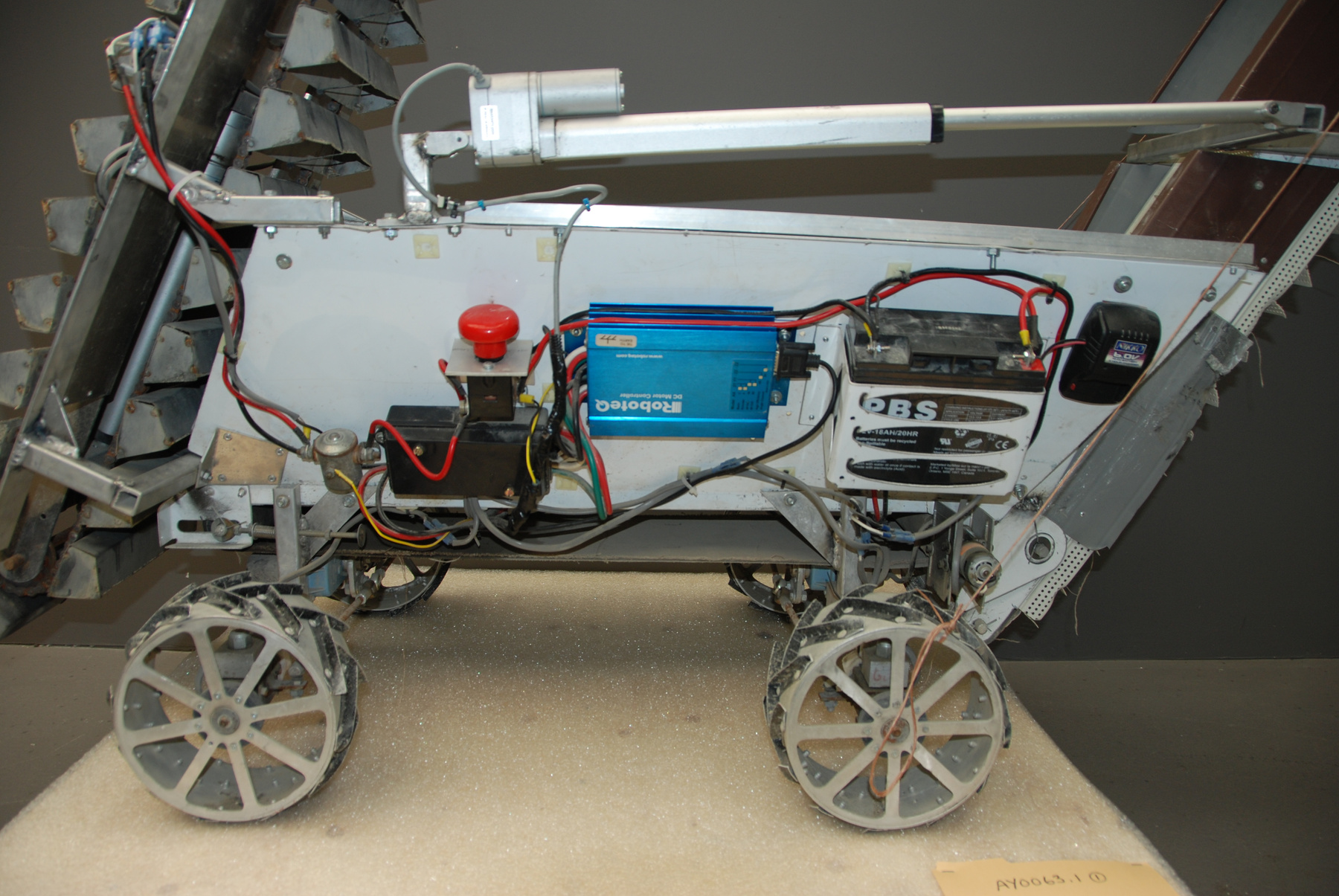
Taken from Reference # 1: The vehicle has been designed by fourth-year students at the Laurentian University, Bharti School of Engineering. The school specializes in innovations in mining technologies. The all-male team included: Samuel Carrière, Patrick Chartrand, Stéphane Chiasson, Myles Chisholm, Drew Dewit, Gregory Lakanen, Jeffrey Pagnutti, and Jean-Sebastien Sonier, who were advised by faculty members Dr. Markus Timusk and Gregory Dalton. The team had a budget of $10,000 and cooperated with the Innovation and Development Department at Northern Centre for Advanced Technology. NORCAT is a private, non-profit organization created to support young, innovative entrepreneurs in the Sudbury area. Located in Sudbury, it is closely associated with mining sector and operates an experimental, training mine. The Bharti team also collaborated with the Canadian Space Agency and NASA’s In-Situ Resources Utilization Program. The Centre for Excellence in Mining Innovation provided some funding. - Function
-
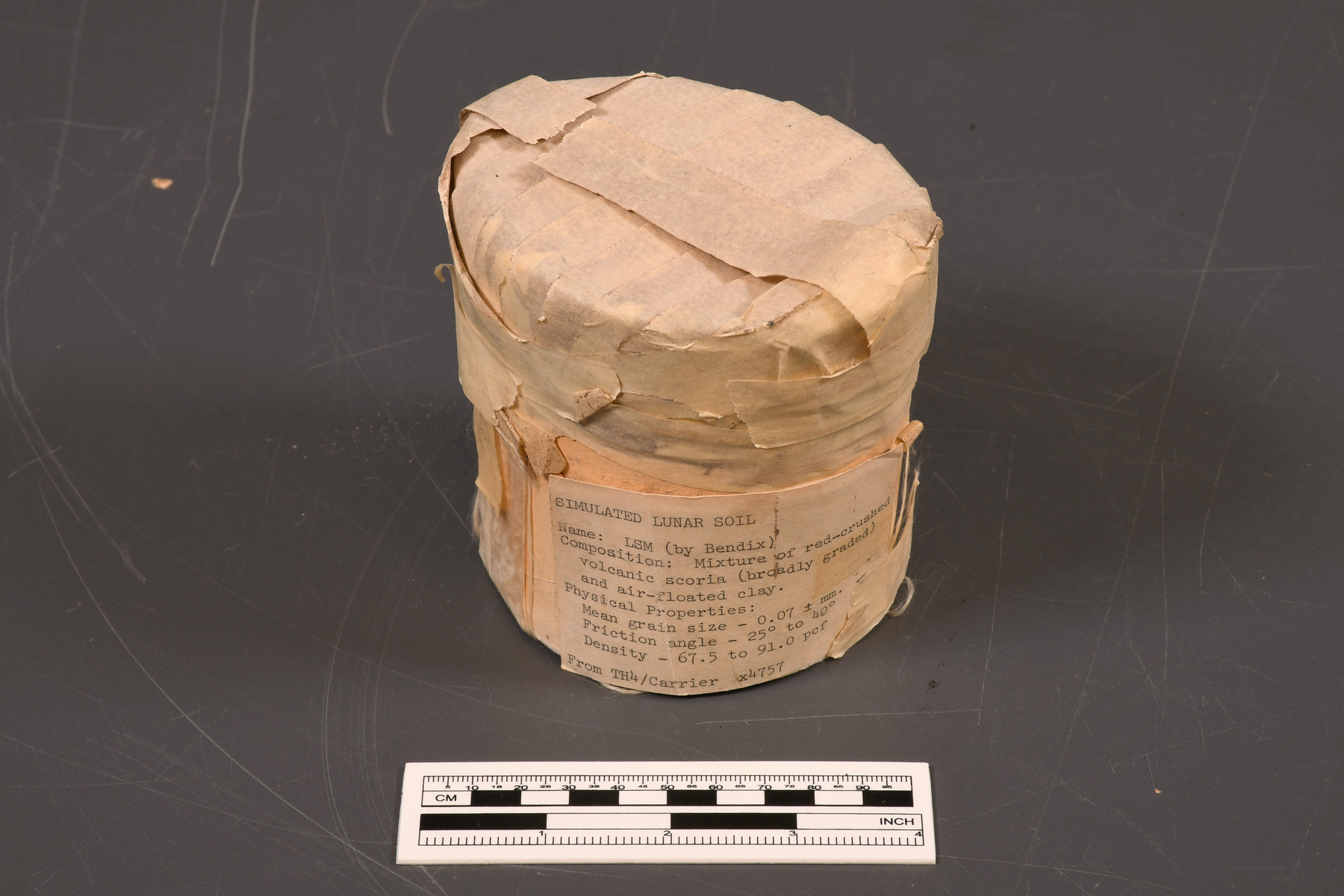
Vehicle designed to excavate, collect, and deposit a maximum amount of lunar simulant in 15 min. to prove possibility of extraction on the Moon. - Technical
-
Taken from Reference # 1: At this moment, the conversation on mining in space is mostly propelled by the planetary science community in the United States and in Canada with limited participation from other countries such as India and China. The discussion is led by the Space Resources Roundtable (SRR), a group closely associated with space sciences, which is looking to establish links with the natural resources sector and entrepreneurs interested in developing space resources. The SRR organizes an annual Planetary and Terrestrial Mining Sciences Symposium to promote closer relationship between the space and mining industries. The response form the mining sector is not overly enthusiastic. The methodological approaches to space exploration and natural resources exploration are fundamentally different. While space science is highly theoretical, mining is based on empirical, tangible and material evidence always understood in the commercial\market forces context. Mining industries carefully monitor technological developments and await a sound business case, but are not making any substantial commitments to mining in space. NASA together with a couple of space exploration companies such as Moon Express, and Shackleton Energy, is at the forefront of the technological experimentation on mining in space. This vehicle has been a winning entry in the 2011 NASA competition to design a remote controlled or autonomous excavator, called a Lunabot that can collect and deposit a maximum amount of lunar simulant within 15 minutes. The vehicle was designed according to a strict set of criteria provided by NASA such as size (1.5mx0.75cmx2m), mass (<80kg), and tele-robotic control on one channel network. The vehicle had to preserve physical properties of the stimulant with no contamination. The Laurentian University students used Advanced Modeling Technique to design the vehicle, and had to calculate various forces that would affect the operation in the lunar context. They had to estimate driving conditions and come up with software architecture and a communication system that would run the Lunabot remotely. After tests, the students made some modifications to the physical vehicle such as an extra motor, narrower scoops, and larger diameter pulley. The final system also included autonomous drill with a decision support; substrate identification system; and predicted maintenance issues. During the competition, Lunabot excavated 237.4 kg of simulant, but experienced two communication failures. It came first among 47 teams (35 US and 12 from other countries). - Area Notes
-
Unknown
Details
- Markings
- There are six decals affixed to the sides of the unloader. Both sides have the same decals which are: "NASA", "Professional Engineers/ Ontario", "Laurentian University/ Universite Laurentienne","5th Wheel/ TM/ TRAINING INSTITUTE", "TEMISKO", "NORCAT/ NORTHERN CENTRE FOR ADVANCED TECHNOLOGY INC.". There are also four decals affixed to the inside of the bucket, which are: "NORCAT/ NORTHERN CENTRE FOR ADVANCED TECHNOLOGY INC.", "EW/ EBERT WELDING LTD.", "Deltion/ Innovations Ltd", "Laurentian University/ Universite Laurentienne".
- Missing
- N/A
- Finish
- Primarily made of metal which is either unfinished, painted white or painted brown. There is a separate component which is attached to side wall which is a brushed medium blue. There are also a few black synthetic cases which incorporate other pieces. There are several wires and cables that are either red, green, yellow or black in colour. There are several decals affixed to the "Lunabot". These decals vary in colour from white to blue to red. There are two synthetic batteries affixed to the side walls which both have white print. There is a semi-opaque green box and lid also affixed to the outside of the bucket which contains other components and wiring. There is another semi-opaque white box and lid beside the green one which also contains components and wiring.
- Decoration
- N/A
CITE THIS OBJECT
If you choose to share our information about this collection object, please cite:
Laurentian University (Bharti School of Engineering), Excavator, autonomous, 2011, Artifact no. 2014.0031, Ingenium – Canada’s Museums of Science and Innovation, http://collection.ingeniumcanada.org/en/id/2014.0031.001/
FEEDBACK
Submit a question or comment about this artifact.
More Like This















































2014.0031.001