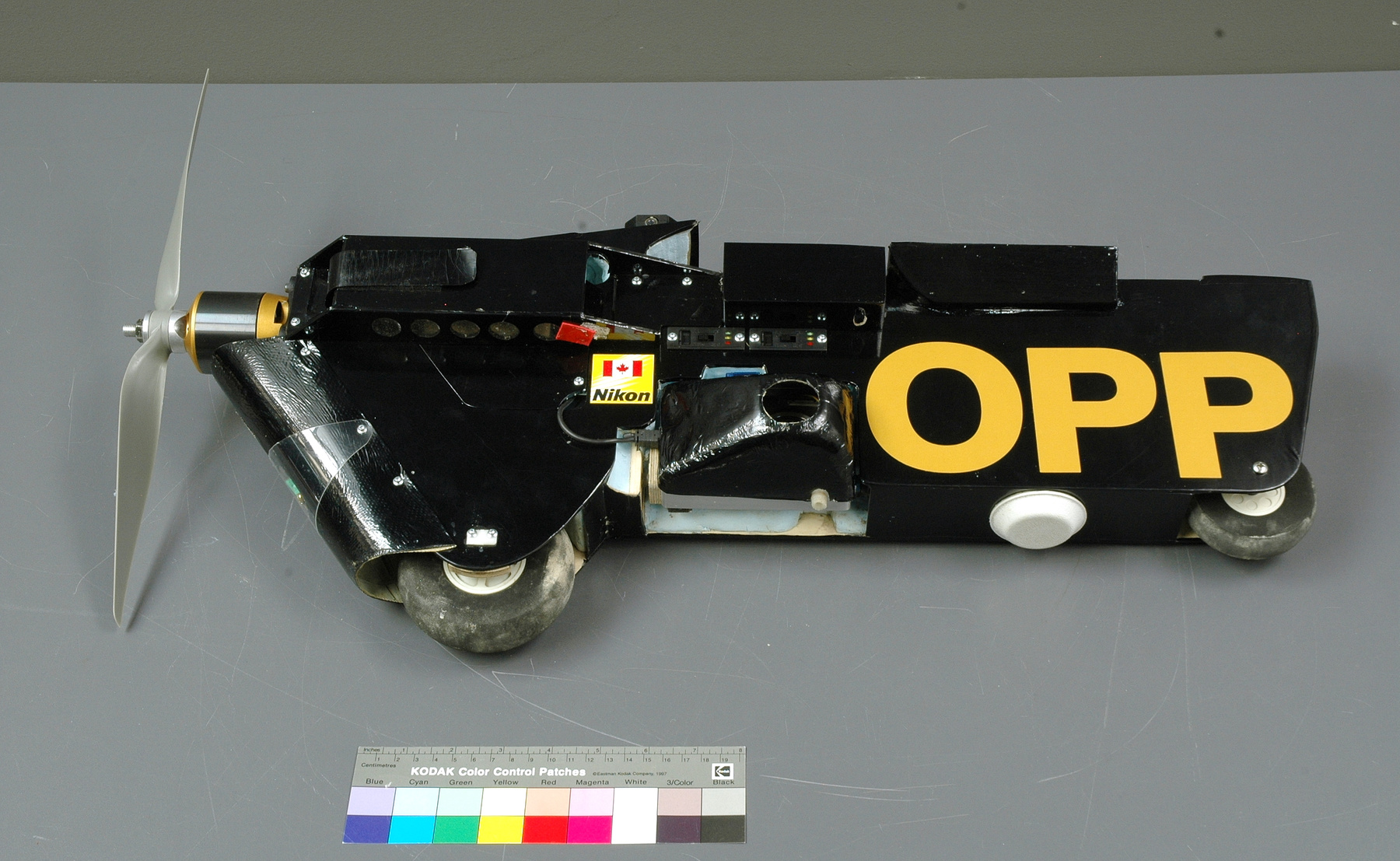
Vehicle, remotely operated
Use this image
Can I reuse this image without permission? Yes
Object images on the Ingenium Collection’s portal have the following Creative Commons license:
Copyright Ingenium / CC BY-NC-ND (Attribution-NonCommercial 4.0 International (CC BY-NC 4.0)
ATTRIBUTE THIS IMAGE
Ingenium,
2016.0064.001
Permalink:
Ingenium is releasing this image under the Creative Commons licensing framework, and encourages downloading and reuse for non-commercial purposes. Please acknowledge Ingenium and cite the artifact number.
DOWNLOAD IMAGEPURCHASE THIS IMAGE
This image is free for non-commercial use.
For commercial use, please consult our Reproduction Fees and contact us to purchase the image.
- OBJECT TYPE
- tethered
- DATE
- 1975
- ARTIFACT NUMBER
- 2016.0064.001
- MANUFACTURER
- Unknown
- MODEL
- TROV
- LOCATION
- Unknown
More Information
General Information
- Serial #
- N/A
- Part Number
- 1
- Total Parts
- 1
- AKA
- N/A
- Patents
- N/A
- General Description
- Aluminum body with ferrous metal parts, and synthetic tubing, component casings, and membranes
Dimensions
Note: These reflect the general size for storage and are not necessarily representative of the object's true dimensions.
- Length
- 198.0 cm
- Width
- 169.0 cm
- Height
- 175.0 cm
- Thickness
- N/A
- Weight
- N/A
- Diameter
- N/A
- Volume
- N/A
Lexicon
- Group
- Marine Transportation
- Category
- Diving
- Sub-Category
- N/A
Manufacturer
- AKA
- Unknown
- Country
- Unknown
- State/Province
- Unknown
- City
- Unknown
Context
- Country
- Canada
- State/Province
- Unknown
- Period
- Unknown
- Canada
-
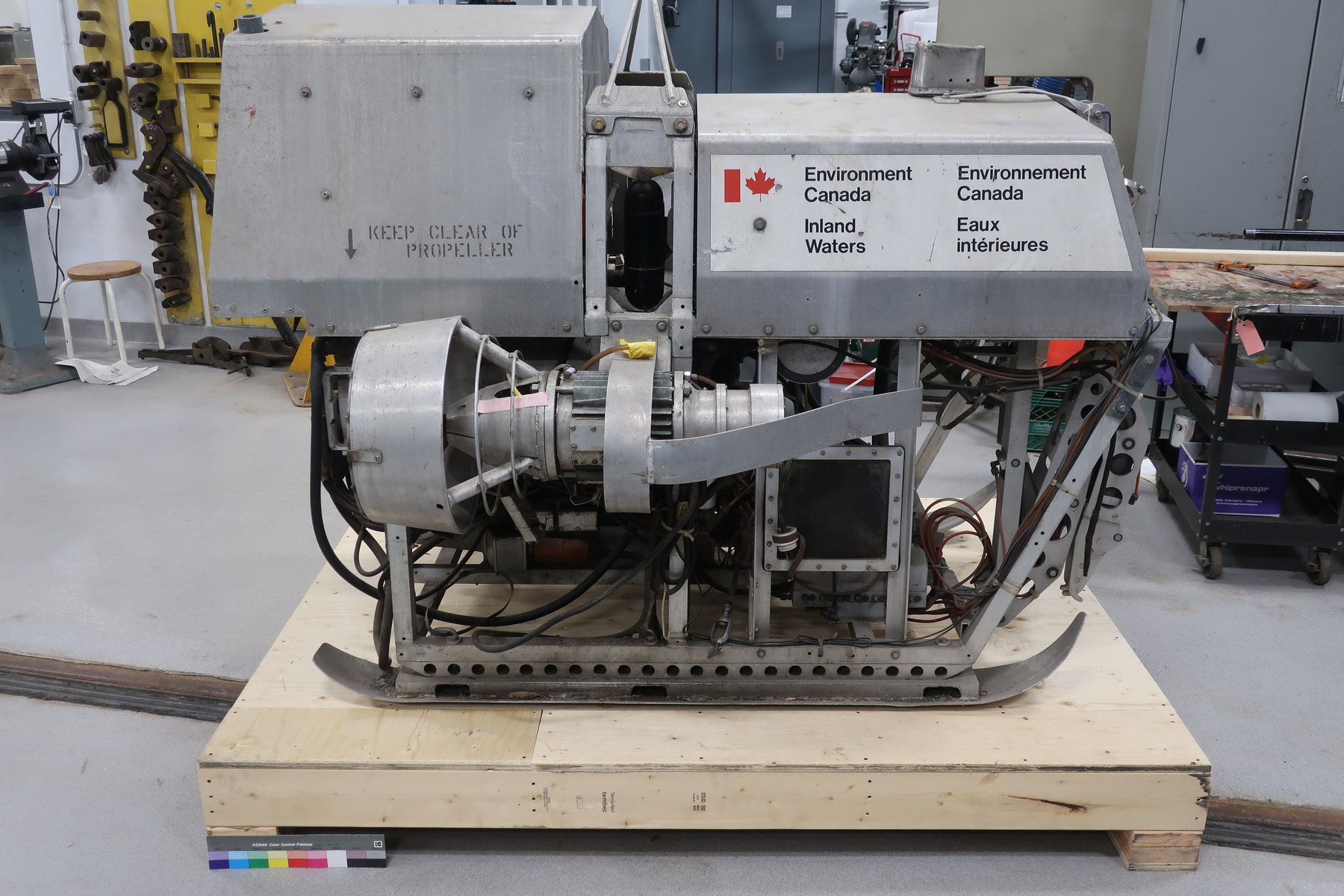
The expansion of underwater mobility has played a crucial role in the transformation of Canada. Critical civil engineering projects like bridges, tunnels and coastal infrastructure could only be completed with the application of technologies that allowed workers to function under water for increasingly long periods of time. But the limits of human physiology were such that, by the 1960s, researchers were beginning to explore the possibilities of "unmanned" underwater mobility. Canadians have been at the forefront of these developments since the 1970s with several companies developing different types of submersible vehicles. The ISE TROV is of particular significance because it was one of the world’s first commercial ROV systems and because the company that made it was and remains an internationally recognized leader in the field. The company’s founder, James McFarlane, has created a niche for his products, in part, by understanding the individual missions of his buyers and designing to meet their specific needs. In this small market, ISE has prospered by building a wide variety of specialized vehicles for, among other things, inspecting oil pipelines and telephone cables, underwater surveying and geological research. It also makes vehicles for the military and its experience with remote control has led it into the related field of designing robotic manipulation devices. The TROV represents government-industry cooperation in research and development. The oil crisis of the mid-1970s pushed the boundaries of oil exploration creating an urgent need for sophisticated equipment that could function in harsh offshore environments. None was harsher than the Canadian arctic. After CCIW tested the TROV in Lake Ontario (which had its own special challenges), the team moved it to Panarctic Oils Limited’s Drake P-40 drill site northeast of Melville Island. There, researchers from the oil company and the departments of Energy, Mines and Resources, Fisheries and Environment assessed the feasibility of using this type of submersible for geological investigation and surveying. The fact the oil industry remains one of ISE’s main customers suggests that the vehicle performed well in these tests. - Function
-
Used to test and assess the capabilities of the technology developed for this remotely operated vehicle in different environments and roles. This was meant to be a versatile vehicle that could undertake different types of work, including geological research and underwater archaeology. - Technical
-
Underwater environments are inhospitable for human beings but our determination to work there has forced researchers to find ways to make it practical. Between 1945 and 1980, researchers made dramatic advances in underwater mobility. They explored everything from the design and development of scuba gear and submersibles to the behaviour of the human body in high pressure environments. The goal of most of this research was to make it possible for humans to work more effectively and safely under water. Canadian researchers and companies played an important role in many of these developments. By the 1960s, though, researchers had begun to recognize that there were definite limits to what technology could do to improve human safety and capabilities under water. Some of them turned their attention to finding ways to remove humans from the undersea environment by developing remotely controlled submersibles. The challenge for researchers and engineers was to build a vehicle that was sufficiently robust to withstand the rigours of the underwater environment while at the same time was sophisticated and responsive enough to carry out complex tasks. Military researchers did most of earliest work on remotely operated vehicles but the oil industry was not far behind. In 1962 Shell Oil launched its Mobot, “a Cyclops-like robot” that was supposed to land on a track surrounding the blow out preventer stack of an oil rig and then run around the track “turning setscrews with a socket on an extendable arm.” The Mobot, though, had “an unfortunate habit of going out of control on the bottom and was constantly having to be rescued.” Thus, instead of replacing expensive divers, it ended up being a big money-maker for diving companies. Researchers, of course, did not give up on the idea of remotely operated vehicles. With increasing access to sophisticated electronics, they saw great potential for these devices. Their gamble began to pay off when, in the mid-1970s, the oil embargo made exploration in increasingly challenging regions more attractive. Many researchers saw the opportunity to develop “smaller, high-endurance robotic vehicles for various subsea tasks” that could not be done profitably by divers or even human occupied submersibles. The ISE TROV is good example of an early commercial submersible that not only met these demanding requirements but also helped to establish ISE in a very competitive marketplace. The TROV was tested in at least two very different environments, carrying out very different tasks. The results of those tests informed future use of the vehicle (and some small adaptations) and allowed the company to refine their product. The company went on to produce some 200 remotely operated underwater vehicles of various types in the next 20 years and is still a leader in the field today. - Area Notes
-
Unknown
Details
- Markings
- On proper front: "T.R.O.V./ McELHANNEY OFFSHORE, VANCOUVER"/ On proper left and proper right, in black markings on a white background: Environment/ Canada/ Inland/ Waters/ Environnement/ Canada/ Eaux/ intérieures"/ In faded black letters on a metal band on top of the motor on both the proper left and proper right: "NO STEP"/ In faded black letters on the metal casing on the proper left and proper right, toward the back: "KEEP CLEAR OF/ PROPELLER [arrow pointing down]"/
- Missing
- Camera
- Finish
- Predominantly light grey metal frame and body with black and red markings, and white and red design on proper right and proper left. Black, red and translucent tubing and cables connect different components on the under-side of the object. Two predominantly blue pumps can be found near the base of the unit and two cream-coloured porous blocks with red exteriors are in the rear section.
- Decoration
- N/A
CITE THIS OBJECT
If you choose to share our information about this collection object, please cite:
Unknown Manufacturer, Vehicle, remotely operated, 1975, Artifact no. 2016.0064, Ingenium – Canada’s Museums of Science and Innovation, http://collection.ingeniumcanada.org/en/id/2016.0064.001/
FEEDBACK
Submit a question or comment about this artifact.
More Like This




































































2016.0064.001