Satellite
Use this image
Can I reuse this image without permission? Yes
Object images on the Ingenium Collection’s portal have the following Creative Commons license:
Copyright Ingenium / CC BY-NC-ND (Attribution-NonCommercial 4.0 International (CC BY-NC 4.0)
ATTRIBUTE THIS IMAGE
Ingenium,
2017.0144.001
Permalink:
Ingenium is releasing this image under the Creative Commons licensing framework, and encourages downloading and reuse for non-commercial purposes. Please acknowledge Ingenium and cite the artifact number.
DOWNLOAD IMAGEPURCHASE THIS IMAGE
This image is free for non-commercial use.
For commercial use, please consult our Reproduction Fees and contact us to purchase the image.
- OBJECT TYPE
- Scale/Model
- DATE
- 2008
- ARTIFACT NUMBER
- 2017.0144.001
- MANUFACTURER
- Unknown
- MODEL
- Dextre
- LOCATION
- Unknown
More Information
General Information
- Serial #
- N/A
- Part Number
- 1
- Total Parts
- 2
- AKA
- N/A
- Patents
- N/A
- General Description
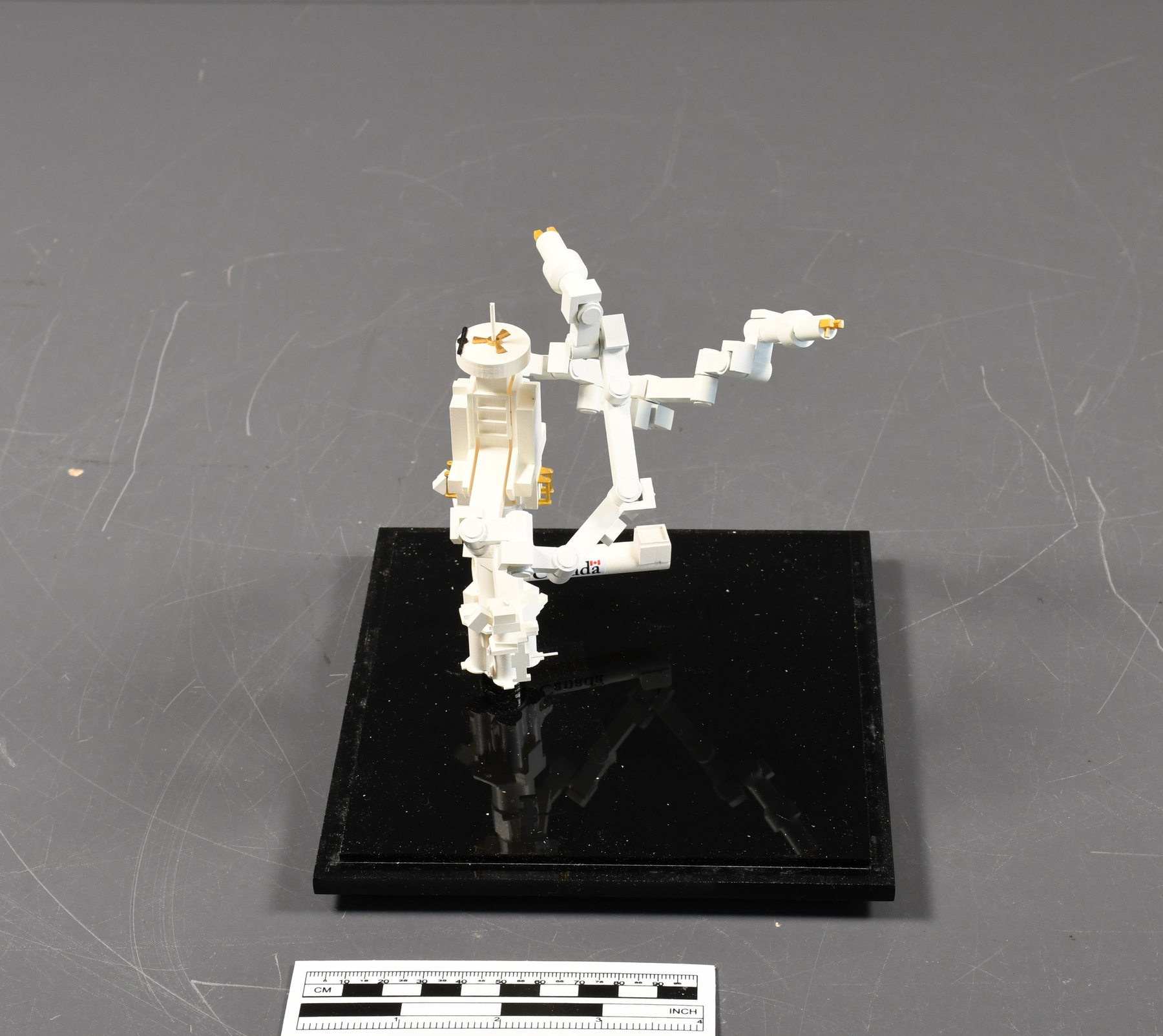
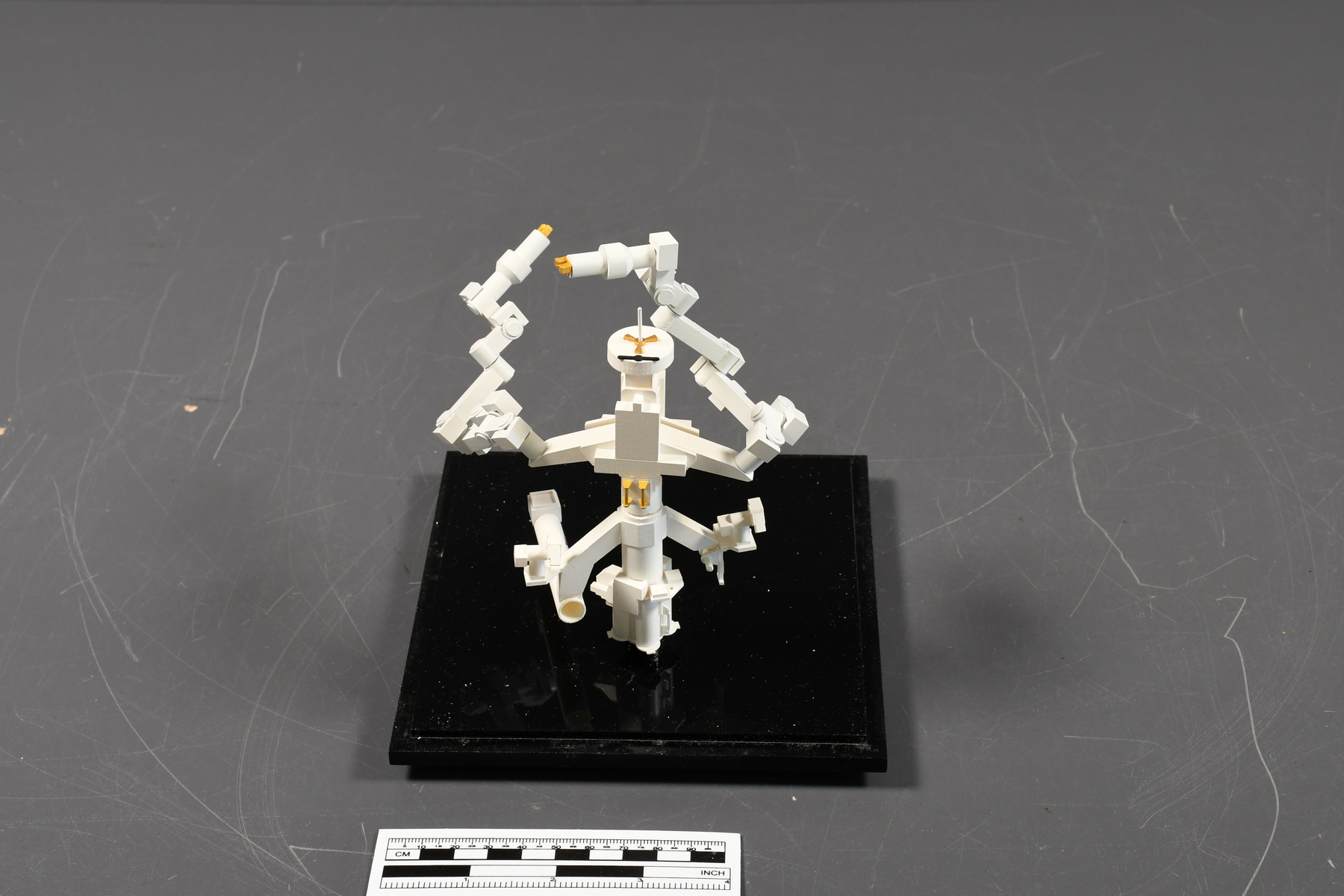
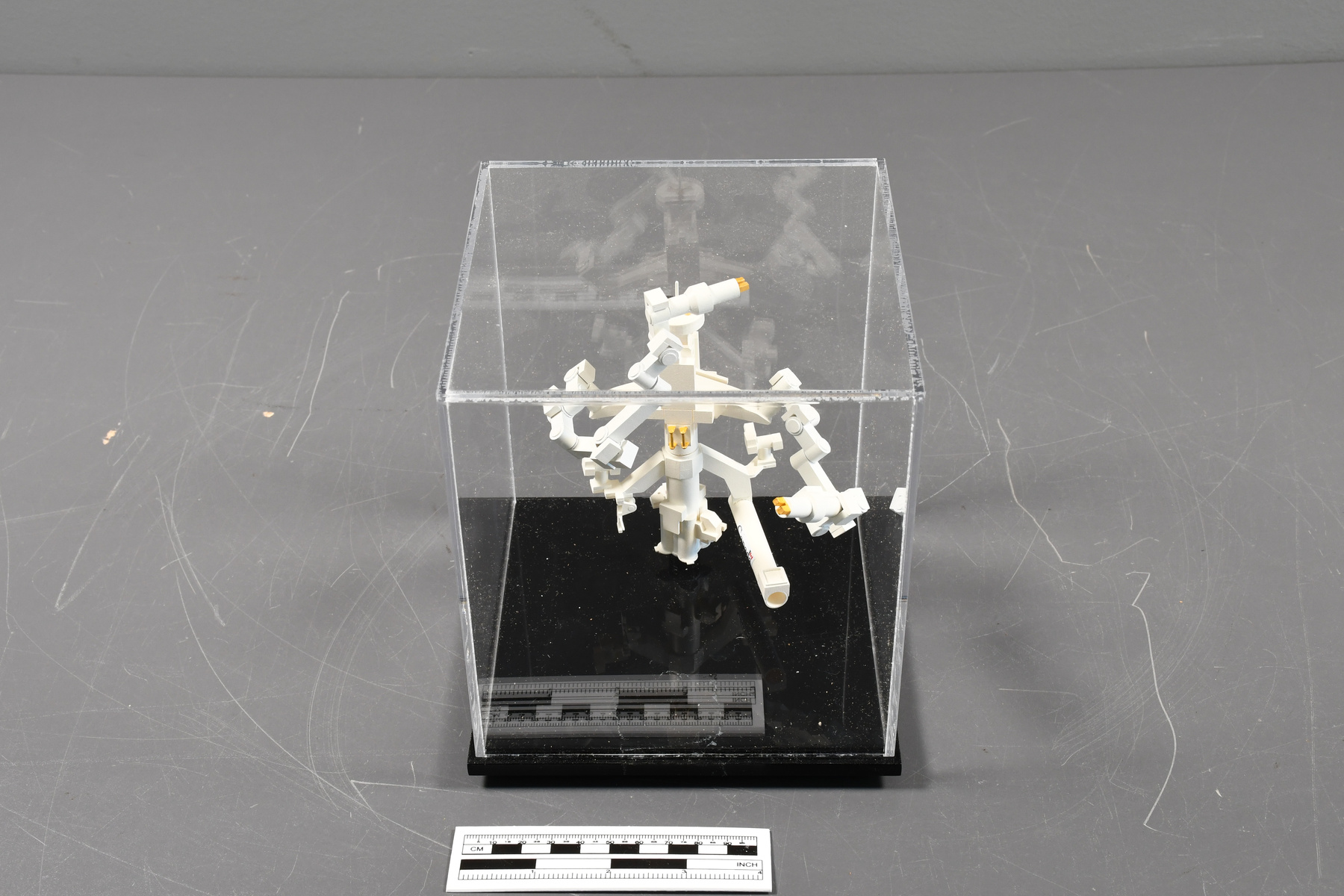
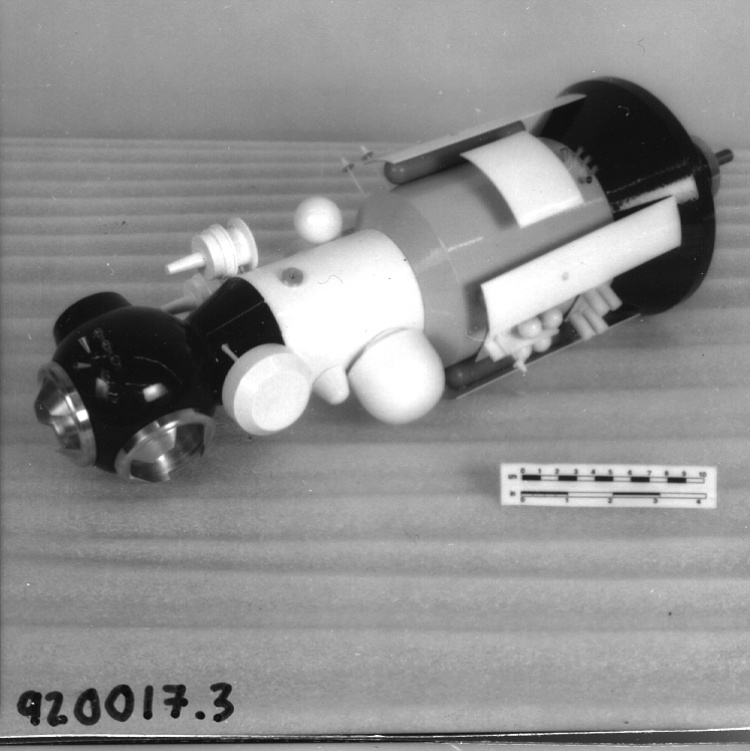
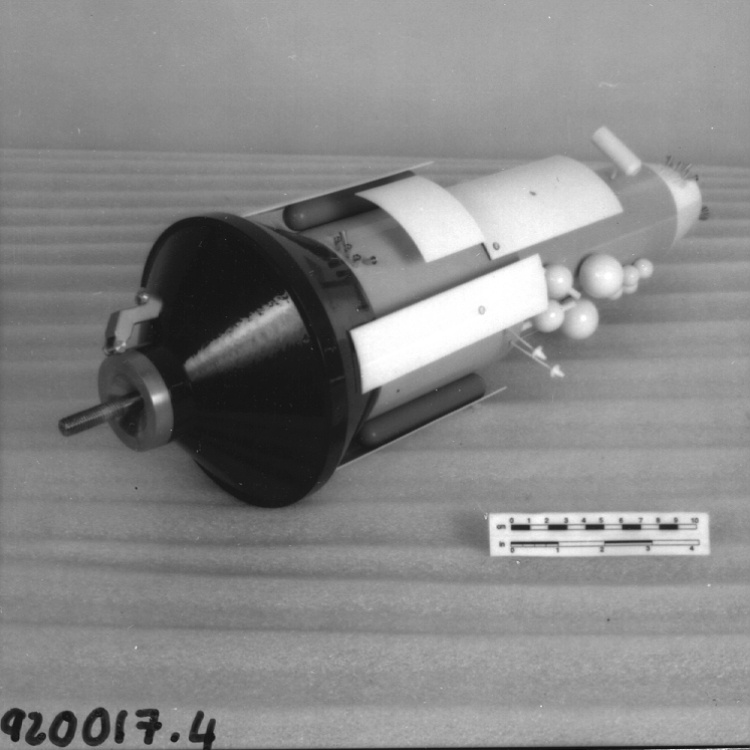
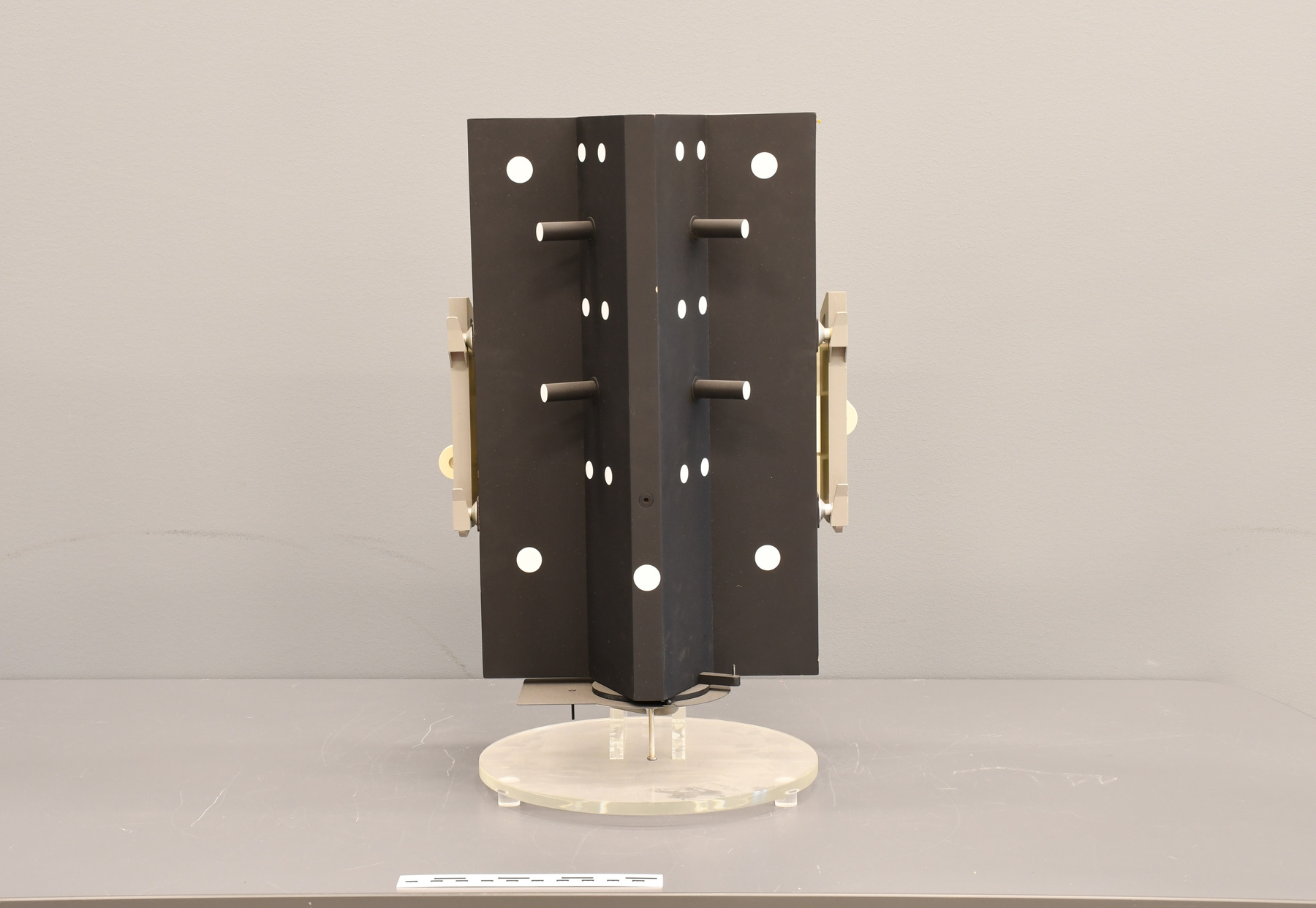
- Scale model of the sophisticated Dextre robot. Maquette à échelle du robot sophistiqué Dextre.
Dimensions
Note: These reflect the general size for storage and are not necessarily representative of the object's true dimensions.
- Length
- 15.0 cm
- Width
- 15.0 cm
- Height
- 15.0 cm
- Thickness
- N/A
- Weight
- N/A
- Diameter
- N/A
- Volume
- N/A
Lexicon
- Group
- Space Technology
- Category
- Manned spacecraft
- Sub-Category
- N/A
Manufacturer
- AKA
- Unknown
- Country
- Unknown
- State/Province
- Unknown
- City
- Unknown
Context
- Country
- Unknown
- State/Province
- Unknown
- Period
- Unknown
- Canada
-
The Special Purpose Dextrous Manipulator, affectionately known as Dextre, is an incredibly sophisticated robot. Dextre follows in the footsteps of legendary Canadian robotic arms, Canadarm and Canadarm2, and is part of the International Space Station’s Mobile Servicing System (MSS). Developed by MDA, the MSS represents Canada’s primary contribution to the ISS as one of 15 partner states. Dextre is operated from the ground, either at the Johnson Space Center in Houston, Texas, or at the Canadian Space Agency’s headquarters in Saint-Hubert, Quebec. It is programmed in Saint-Hubert, where robotics planners choreograph Dextre’s activities and ensure the robot has the necessary software to perform its tasks. The model was built as part of an order placed by the Canadian Space Agency. Le Special Purpose Dexterous Manipulator, connu comme le Dextre, est un robot incroyablement sophistiqué. Dextre suit les pas des bras robotiques légendaires canadiens comme le Canadarm et Canadarm 2 et fait partie du système de service mobile de la Station spatiale internationale. Développé par MDA, le système de service mobile représente la contribution primaire canadienne à la Station spatiale internationale en tant qu'un des quinze partenaires d'états. Dextre est opérée au sol, sois au Centre spatial Lyndon B. Johnson à Houston au Texas ou au siège social de l'Agence spatiale canadienne à Saint-Hubert au Québec. Dextre est programmée à Saint-Hubert où les techniciens robotiques planifient les tâches de Dextre pour assurer qu'il a assez de logiciel pour compléter ses tâches. Ce modèle a été construit par l'Agence spatiale canadienne. - Function
-
This is a model built for display purposes. Ceci est un modèle conçu pour des raisons d’affichage. - Technical
-
Dextre was designed to perform external maintenance on the ISS, in many cases, tasks that could previously only be performed by astronauts on risky and time consuming spacewalks. Dextre’s two 3.35 metre-long arms have seven joints which can move up and down, side to side, as well as the ability to rotate and roll – this means that the robot has greater range of motion the human arm. Dextre is able to handle equipment in a range of sizes, from a phone book to phone booth. Its “hands” function much like a Swiss Army knife, which includes a retractable socket wrench, camera, lights, retractable umbilical connector for electricity, as well as data and video connections. The hands also have sensors, enabling the robot to have a sense of touch when applying force to an object. The robot installs and removes small payloads from the ISS, opens and closes covers, and reconnects cables. The International Space Station’s standard operating equipment such as batteries, switch boxes, and computers, are all contained in boxes so to speak, called Orbital Replacement Units (ORUs). ORUs can be easily switched out when required. Since becoming fully certified in 2010, Dextre handles nearly all such external maintenance tasks on the Station. Dextre can also perform maintenance on itself, its follow robotics partners (Canadarm2 and the Mobile Base System), and has proven capable of refueling satellites in orbit. Dextre a été conçu pour accomplir de l'entretien externe de la SSI. Dans la plupart des cas, les tâches étaient auparavant accomplies par des astronautes avec des sorties dans l'espace risquées et qui prend du temps. Les deux bras à Dextre ont une longueur de 3.35 mètres ont sept jointures qui bougent en haut et en bas, d'un côté à l'autre et à l'habileté de faire des rotations. Effectivement, ceci veut dire que Dextre a une plus grande amplitude des mouvements qu'un bras humain. Dextre est capable de manutentionner de l'équipement dans une variété de grandeur, tel qu'un bottin téléphonique jusqu'à une cabine téléphonique. Les mains du robot fonctionnent comme un couteau suisse qui inclut une clé à douille rétractable, une caméra, des lumières, une prise ombilicale rétractable pour l'électricité, ainsi que des connexions pour vidéos et données. Les mains ont aussi des capteurs qui permettent au robot d'avoir la capabilité de toucher l'objet et reconnaître le montant de force qu'il utilise. Le robot installe et enlève des petites charges utiles de la SSI, ouvre et fermes des couvercles et connecte des câbles. Les équipements de procédure opérationnelle de la SSI comme des batteries, des boîtes de commutations et des ordinateurs sont entreposés dans des boîtes qui s'appellent Orbital Replacement Units (ORU). Les ORU peuvent être remplacés facilement. Après avoir reçu toute certification nécessaire en 2010, le Dextre est en charge de presque chaque tâche d'entretien externe de la Station. Dextre est aussi capable de compléter des tâches sur lui-même et reflète le Canadarm 2. Finalement, Dextre a été capable de ravitailler l'essence pour des satellites en orbite. - Area Notes
-
Unknown
Details
- Markings
- On one of the lower arms of the model: " CANADA "
- Missing
- Appears complete.
- Finish
- White synthetic model representing the Dextre robot. The model has white synthetic pieces that reprensent the arms, the torso, shoulders and head of the model. The model also has a few small yellow and black synthetic pieces. The model is fixed onto a black synthetic base. Maquette blanche et synthétique qui représente le robot Dextre. La maquette a des pièces blanches synthétiques qui représente les bras, le torso, les épaules et la tête du modèle. La maquette a aussi quelque petits morceaux jaunes et noir. La maquette est affixée sur une base synthétique noire.
- Decoration
- N/A
CITE THIS OBJECT
If you choose to share our information about this collection object, please cite:
Unknown Manufacturer, Satellite, circa 2008, Artifact no. 2017.0144, Ingenium – Canada’s Museums of Science and Innovation, http://collection.ingeniumcanada.org/en/id/2017.0144.001/
FEEDBACK
Submit a question or comment about this artifact.
More Like This























































2017.0144.001